首頁(yè)
聯(lián)系我們
-
- 電話: 024-83656512
- 通訊地址: 遼寧省沈陽(yáng)市渾南區(qū)創(chuàng)新路195號(hào)東北大學(xué)渾南校區(qū)機(jī)器人學(xué)院H019信箱
突破!東北大學(xué)首篇第一作者IEEE T-RO
日前,東北大學(xué)機(jī)器人學(xué)院2021屆碩士生吳艷敏為第一作者,張?jiān)浦藿淌跒橥ㄓ嵶髡撸瑱C(jī)器人學(xué)院為第一單位的學(xué)術(shù)長(zhǎng)文(regular paper)被機(jī)器人領(lǐng)域國(guó)際頂級(jí)期刊IEEE Transactions on Robotics (T-RO) 正式錄用,將于近期發(fā)表。
該論文的題目為《An Object SLAM Framework for Association, Mapping, and High-Level Tasks》,文中提出了一個(gè)完整的物體級(jí)SLAM(Simultaneous Localization and Mapping)框架。首先提出了用于數(shù)據(jù)關(guān)聯(lián)、物體參數(shù)化和語(yǔ)義地圖創(chuàng)建的關(guān)鍵技術(shù),然后基于創(chuàng)建的物體地圖探究了在多項(xiàng)下游任務(wù)中應(yīng)用,包括機(jī)械臂主動(dòng)探索與物體抓取、增強(qiáng)現(xiàn)實(shí)、場(chǎng)景圖匹配與語(yǔ)義重定位。這項(xiàng)研究為物體級(jí)SLAM的理論構(gòu)建與SLAM在真實(shí)環(huán)境中的應(yīng)用提供了新的思路和解決方案。
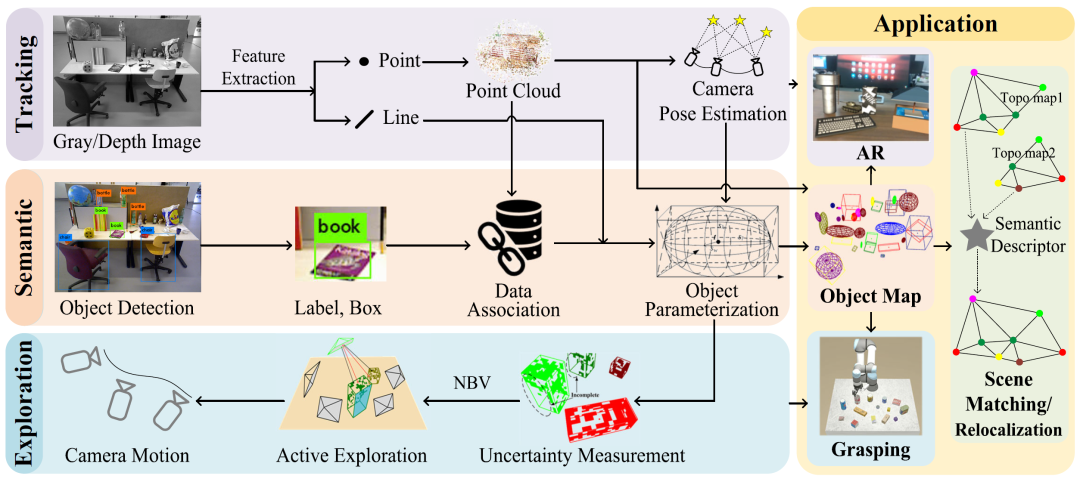
(圖1 提出方法的系統(tǒng)框架)
IEEE Transactions on Robotics為機(jī)器人學(xué)領(lǐng)域公認(rèn)的三大頂級(jí)期刊(Science Robotics/T-RO/ IJRR)之一,所發(fā)表的學(xué)術(shù)成果通常代表著機(jī)器人領(lǐng)域最先進(jìn)的重大進(jìn)展,要求論文在理論和工程實(shí)現(xiàn)上同時(shí)推動(dòng)機(jī)器人學(xué)的進(jìn)步,對(duì)機(jī)器人領(lǐng)域?qū)W術(shù)研究和工業(yè)應(yīng)用具有重要意義。
據(jù)悉,這是學(xué)校首篇第一作者為東北大學(xué)的IEEE T-RO論文,實(shí)現(xiàn)了東北大學(xué)IEEE T-RO期刊論文零的突破。
此外,機(jī)器人學(xué)院近期在智能機(jī)器人系統(tǒng)的定位、視覺(jué)和控制等方面,在IEEE TMM、TIM、TCSVT、TNNLS、TII、TIE、IEEE ICRA、IROS等國(guó)際頂級(jí)期刊和頂級(jí)會(huì)議上發(fā)表學(xué)術(shù)論文多篇,展示了我校在國(guó)際智能機(jī)器人領(lǐng)域創(chuàng)新性基礎(chǔ)研究的突出成果。
